Mô hình đào tạo phát triển xe tự lái thông minh ROS ATP-99012 kèm hệ thống đường thực tế cho xe tự lái
Thông tin sản phẩm
| Model sản phẩm |
ATP-99012 |
| Nhà sản xuất |
China |
Giới thiệu về Sản phẩm
Mô hình này dựa trên nền tảng hệ thống ROS chính thống hiện nay để nghiên cứu và phát triển, sử dụng cảm biến LIDAR, radar siêu âm, camera độ sâu và các thành phần khác của hệ thống lái tự động làm hệ thống nhận dạng môi trường.
Mô hình sử dụng bộ điều khiển chính Raspberry Pi làm hệ thống điều khiển quyết định, còn khung gầm và bo mạch điều khiển chính STM32 làm bộ phận thực thi hệ thống để hiện thực hóa việc kết hợp nhận dạng đa cảm biến và điều khiển lái xe thông minh, chẳng hạn như lập bản đồ và dẫn đường LIDAR, lập bản đồ và dẫn đường trực quan, hành trình đa điểm, theo dõi radar laser, theo dõi trực quan độ sâu, kiểm tra trực quan, tránh chướng ngại vật bằng radar siêu âm, dẫn đường tự động và tránh chướng ngại vật, truyền hình ảnh APP, điều khiển tay cầm không dây PS2, gọi và điều khiển bằng giọng nói, định vị nguồn âm thanh, v.v., giúp xe đạt được khả năng lái tự động tốc độ thấp và hiện thực hóa chức năng giảng dạy cốt lõi của lái xe tự động. Sản phẩm phù hợp cho nhu cầu giảng dạy nghiên cứu lý thuyết và đào tạo thực hành về hệ thống công nghệ xe thông minh kết nối tại các trường đại học giáo dục phổ thông và các cơ sở đào tạo.
Tính năng
Kết cấu thân xe thông minh: kết cấu thân xe sử dụng quy trình phun khung kim loại; hệ thống lái sử dụng kết cấu lái Ackermann chính thống; hệ thống điều khiển thân xe sử dụng bảng điều khiển chính STM32 chính thống; chế độ điều khiển động cơ sử dụng điều khiển tốc độ PID động cơ mã DC AB.
Hệ thống điều khiển phía dưới: Nhận các lệnh điều khiển được gửi từ hệ thống ROS, APP, tay cầm PS2, CAN, cổng nối tiếp, mô-đun giọng nói và các hệ thống điều khiển phía trên khác để điều khiển xe thực hiện các thao tác như tăng tốc, giảm tốc, phanh, đánh lái, v.v., đồng thời trả về thông tin tốc độ hiện tại của xe, góc lái, quãng đường đã đi và vị trí hiện tại, đồng thời tự động điều khiển bướm ga, phanh, đánh lái, đèn báo rẽ, số, v.v.
Hệ thống thu thập dữ liệu xe: thu thập thông tin dữ liệu liên quan đến việc lái xe tự động và lái xe trở lại màn hình hiển thị và APP để hiển thị.
Hệ thống nhận dạng giọng nói: nhận dạng thông minh các lệnh thoại và tạo ra các lệnh điều khiển cơ bản để điều khiển xe đạt được các chức năng dẫn đường tự động bằng giọng nói, định vị nguồn thô, triệu hồi giọng nói và điều khiển.
Xử lý hình ảnh: Camera độ sâu, bao gồm camera hai mắt và camera RGB, thu thập môi trường chướng ngại vật phía trước xe theo thời gian thực và thông qua thuật toán học sâu để thực hiện các chức năng điều hướng bản đồ trực quan của xe, theo dõi trực quan độ sâu, tuần tra đường trực quan RGB, theo dõi mục tiêu trực quan, đèn giao thông, nhận dạng người đi bộ và tránh chướng ngại vật. Chiều cao và góc lắp đặt camera có thể được điều chỉnh linh hoạt.
Xử lý LIDAR: Hệ thống nhận dạng LIDAR quét các chướng ngại vật xung quanh 360 độ bằng LIDAR và theo dữ liệu được quét trên máy tính, tự động tạo bản đồ đám mây điểm LIDAR và bản đồ dẫn đường 2D, đồng thời điều khiển xe để đạt được định vị đa điểm LIDAR, tránh chướng ngại vật động và các điều khiển lái xe tự động khác.
Định vị: Bộ điều khiển khung gầm của xe tích hợp cảm biến tư thế chín trục, có thể thu thập vị trí hiện tại và thay đổi gia tốc của xe theo thời gian thực và truyền trở lại hệ thống ROS để xử lý và APP để hiển thị, giúp định vị xe chính xác.
Lập kế hoạch quyết định: Xe phát hiện chướng ngại vật xung quanh thông qua cảm biến môi trường, và sau khi phân tích bằng thuật toán lớp trên, nó sẽ tự động so sánh quỹ đạo lập kế hoạch và mối quan hệ với chướng ngại vật (xa, gần, cắt ngang), đưa ra quyết định cho từng chướng ngại vật (bỏ qua, đi vòng, dừng lại), và sau đó các quyết định này được tích hợp để đưa ra khoảng cách và tốc độ dự kiến cần thiết cho việc lập kế hoạch tốc độ.
Hiển thị giao diện tương tác người-máy
Xe thông minh thông qua kết nối Bluetooth hoặc WIFI, ứng dụng điện thoại di động hiển thị góc lái, tốc độ chạy, mức pin, điều chỉnh thông số PID, màn hình video camera và các thông tin khác, đồng thời có thể điều khiển chuyển động của xe thông qua APP. Các chế độ điều khiển bao gồm điều khiển cảm ứng trọng lực, điều khiển cần gạt, điều khiển chìa khóa, điều khiển tốc độ, v.v. Đường cong thay đổi lượng phanh bướm ga được gửi bởi mô-đun điều khiển và được thực hiện tại chỗ được hiển thị dưới dạng biểu đồ.
Cung cấp mã nguồn phát triển hoàn chỉnh của xe thông minh ROS và sơ đồ bộ điều khiển, giao thức truyền thông chi tiết về giao diện, thông tin phát triển và video, và hướng dẫn đào tạo thực hành xe thông minh.
Thông số kỹ thuật
1. Khung gầm xe
Kết cấu thân xe: Hợp kim nhôm
Kết cấu lái: Tay lái điều khiển điện tử Ackermann
Phương pháp phanh: Phanh động cơ
Pin: 24V20AH
Động cơ: Động cơ DC AB code 100W
Bộ sạc: Bộ sạc thông minh di động, tự động tắt nguồn khi sạc đầy
Điện áp đầu vào sạc: 220V
Kích thước (mm): không nhỏ hơn 435*365*405 (dài × rộng × cao)
Khoảng cách phanh: ≤0.5m
Chất lượng thiết bị toàn bộ xe: ≥10kg
Tổng tải trọng xe: ≤22kg
Tốc độ lái tối đa: Tốc độ lái tối đa: lên đến 1.3m/s, mặc định 0.5m/s
Kích thước bánh xe: Bánh xe cao su 125mm
Chế độ điều khiển điện tử: APP di động, điều khiển từ xa máy bay mô hình không dây, CAN, cổng nối tiếp, giọng nói, ROS
Giao tiếp Giao diện:
MicroUSB*2
Cổng nối tiếp CH340USB-TTL * 1
Cổng nối tiếp CP2102USB-TTL * 1
Giao diện CAN * 1
Cổng nối tiếp TTL * 1
Giao diện điều khiển từ xa máy bay mô hình * 1
Giao diện gỡ lỗi trực tuyến SWD * 1
Chip điều khiển chính cơ bản: STM32F103VET6
2. Bộ phận điều khiển ROS của Autopilot
Nền tảng phần cứng: Jetson Nano B01
CPU: ARM A57 64-bit@1.43GHz
GPU: Maxwell 128 nhân
Hệ điều hành: Ubuntu18.04+ROS melodic
Bộ nhớ: 4GB 64-Bit LPDDR4 25.6GB/giây
Lưu trữ: microSD 64GB
USB: 4*USB3.0+1*USB2.0+Micro-B
Chức năng cổng nối tiếp: GPIO, I ² C, I ² S, SPI, UART
Số chân GPIO: 40
Công suất định mức: 15W
Điện áp đầu vào: 5V
Giao diện camera: 1 * MIPI CSI-2 DPHY lanes
Ngõ ra video: HDMI 2.0 và eDP 1.4
3. Cảm biến môi trường
3.1. LIDAR:
Phạm vi đo: Bán kính đo 0,15~12m
Góc quét 0~360 độ
Tốc độ truyền: 115200Bps
Thời gian quét đơn: 0,25 mili giây
Tần số quét: 10HZ
Tần số đo: 8000HZ
Loại giao diện: USB 2.0
Điện áp cung cấp: 5V DC
Kích thước: 76MM * 41MM
Trọng lượng: 190g
Phạm vi nhiệt độ hoạt động: 0-40℃
3.2. Camera đo độ sâu.
Điểm ảnh RGB: 1080P
Độ phân giải chiều sâu: 1280 x 1024mm
Trường nhìn chiều sâu: 164,85*30*48,25mm
Phạm vi nhìn thấy: 0,6M~8M
Kích thước sản phẩm: 165 x 40 x 30mm
Loại giao diện: USB 2.0
Điện áp đầu vào: 5V
Radar siêu âm 3.3:
Điểm mù làm việc: 0,25 mét
Phạm vi đo: 0,25~4,5 mét
Góc đo: ≈ 60 độ
Tốc độ truyền: 9600Bps
Thời gian quét đơn: 300 mili giây
Tần số đo: 4HZ
Loại giao diện: 485 đến USB 2.0
Điện áp hoạt động: 9-36V DC
Dòng điện hoạt động trung bình: ≤ 35mA
Kích thước: 96,5MM * 50MM * 31.5mm
Phạm vi nhiệt độ làm việc: 0-40℃
Thông tin về hệ thống đường thực tế cho xe tự lái
Giới thiệu về sản phẩm
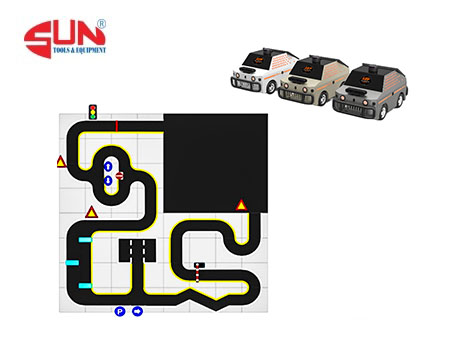
Sử dụng nền tảng di động để phát triển mã lệnh và các gói chức năng lái xe tự động, đồng thời sử dụng xe tự lái thông minh ROS và môi trường đào tạo thực tế hoàn toàn để đánh giá khả năng lái xe và khả năng giải quyết nhiệm vụ của người tham gia. Được trang bị các tiện ích thử nghiệm như ngã ba chữ T, đèn giao thông, vỉa hè, bãi đỗ xe, hàng rào, v.v., xe có thể đạt được hiệu quả lái xe tương tự như xe thật, đồng thời cung cấp cho xe tự lái thông minh ROS một môi trường vận hành và môi trường thử nghiệm chức năng trong quá trình giảng dạy hoặc thi đấu thực tế.
Tất cả các cấu hình có thể được tăng hoặc giảm trên bản đồ tùy theo nhu cầu, và bản đồ cũng có thể được mở rộng hoặc thu nhỏ tùy theo kích thước của địa điểm ứng dụng thực tế.
Tính năng
Đèn giao thông
- Đèn giao thông được đặt trên bản đồ, cho phép xe tự lái thông minh ROS nhận dạng màu sắc của đèn giao thông và tự động khởi động. Thứ tự đèn giao thông: đỏ->vàng->xanh lá cây
Ngã ba chữ T
- Các biển báo rẽ tại ngã ba chữ T được đặt trên bản đồ, cho phép xe tự lái thông minh ROS nhận dạng biển báo rẽ và biển báo thẳng, đồng thời huấn luyện robot ROS di chuyển theo hướng đã chỉ định.
Công trường xây dựng
- Các chướng ngại vật có thể được đặt trên bản đồ để mô phỏng môi trường công trường xây dựng, cho phép xe tự lái thông minh ROS bật tính năng dẫn đường và tránh chướng ngại vật để tránh và vượt qua tất cả các chướng ngại vật từ vị trí nhiệm vụ.
Đỗ xe trong bãi đậu xe
- Các bãi đậu xe và biển báo rẽ được đặt trên bản đồ để mô phỏng việc vào bãi đậu xe, cho phép xe tự lái thông minh ROS vào khu vực đỗ xe sau khi nhận dạng bãi đậu xe và biển báo rẽ, đồng thời thực hiện đỗ xe tự động thích ứng trong khu vực đỗ xe trống.
Thông số kỹ thuật
1. Kích thước môi trường luyện tập thực tế đầy đủ: 7mx5m
2. Chiều rộng đường: 1000mm
Cấu hình cơ bản
Sàn môi trường luyện tập thực tế: đen mờ, không nhẵn. Một đèn giao thông, một biển báo giao lộ hình chữ T, bốn nón gấp, một biển báo bãi đỗ xe, một biển báo giới hạn tốc độ, một biển báo giới hạn tốc độ, một biển báo khúc cua và 40 hàng rào. 40 tấm vải phun sơn.
Hình sản phẩm Mô hình đào tạo phát triển xe tự lái thông minh ROS ATP-99012 kèm hệ thống đường thực tế cho xe tự lái


Thông tin nhà sản xuất :
Công ty ATPEDU CO., LTD được thành lập vào năm 2003 có trụ sở chính tại Tòa nhà Tairan, Quận Futian, trung tâm Thâm Quyến và nhà máy đặt tại Thị trấn Dayun Al, Phố Henggang, Quận Longgang, Thâm Quyến chuyên sản xuất mô hình dạy nghề ôtô như Mô hình đào tạo phát triển xe tự lái thông minh ROS ATP-99012 kèm hệ thống đường thực tế cho xe tự lái
Không chỉ là một công ty công nghệ cao, công ty còn tập trung vào phát triển các nguồn tài nguyên giáo dục phần mềm & phần cứng, dịch vụ giảng dạy giáo dục mà còn là một doanh nghiệp quốc tế cung cấp các giải pháp giảng dạy phần mềm và phần cứng cho người dùng trên toàn thế giới.
Sau hơn 20 năm tích lũy kỹ thuật, ATP có một hệ thống giảng dạy độc đáo và các nguồn tài nguyên giáo trình kỹ thuật số khổng lồ. Các sản phẩm và giải pháp giảng dạy bao gồm các loại xe năng lượng mới, xe nhiên liệu truyền thống, xe kết nối mạng thông minh, internet công nghiệp, sản xuất thông minh, máy móc xây dựng, xe thương mại và các lĩnh vực chuyên môn khác.
Thông qua hơn 30 văn phòng tiếp thị và hậu mãi trên toàn quốc, ATP đã phục vụ gần 3.000 trường cao đẳng và đại học tại Trung Quốc và cung cấp dịch vụ giảng dạy cho hơn 300 trường học tại hơn 50 quốc gia và khu vực ở nước ngoài.
Nhìn về tương lai, ATP cam kết xây dựng một nền tảng sinh thái giáo dục thông minh, tạo ra các nguồn tài nguyên giáo dục chất lượng cao và làm cho việc giảng dạy hiệu quả hơn.
Để biết thêm thông tin chi tiết vui lòng liên hệ:
Điện thoại – Zalo – 0913712255
https://thietbisun.com.vn/mo-hinh-day-nghe-xe-tu-hanh
www.thietbisun.vn











